
产品描述
测量原理:
激光器产生线激光投射于物体表面,经物体漫反射,被图像传感器采集成像。图像处理器内部解算物体在激光投射处的空间位置,得到激光轮廓X方向的宽度信息和Z方向的深度信息。通过被测物体和传感器的相对运动,获取一系列的轮廓信息进行融合,就可以得到物体完整的三维形貌。
*特别适用于Z轴高度信息的检测和测量应用,如产品的高低段差、平面度、位置度、轮廓度、体积等的测量。
*受环境光影响小,广泛应用智能制造的工业检测领域。
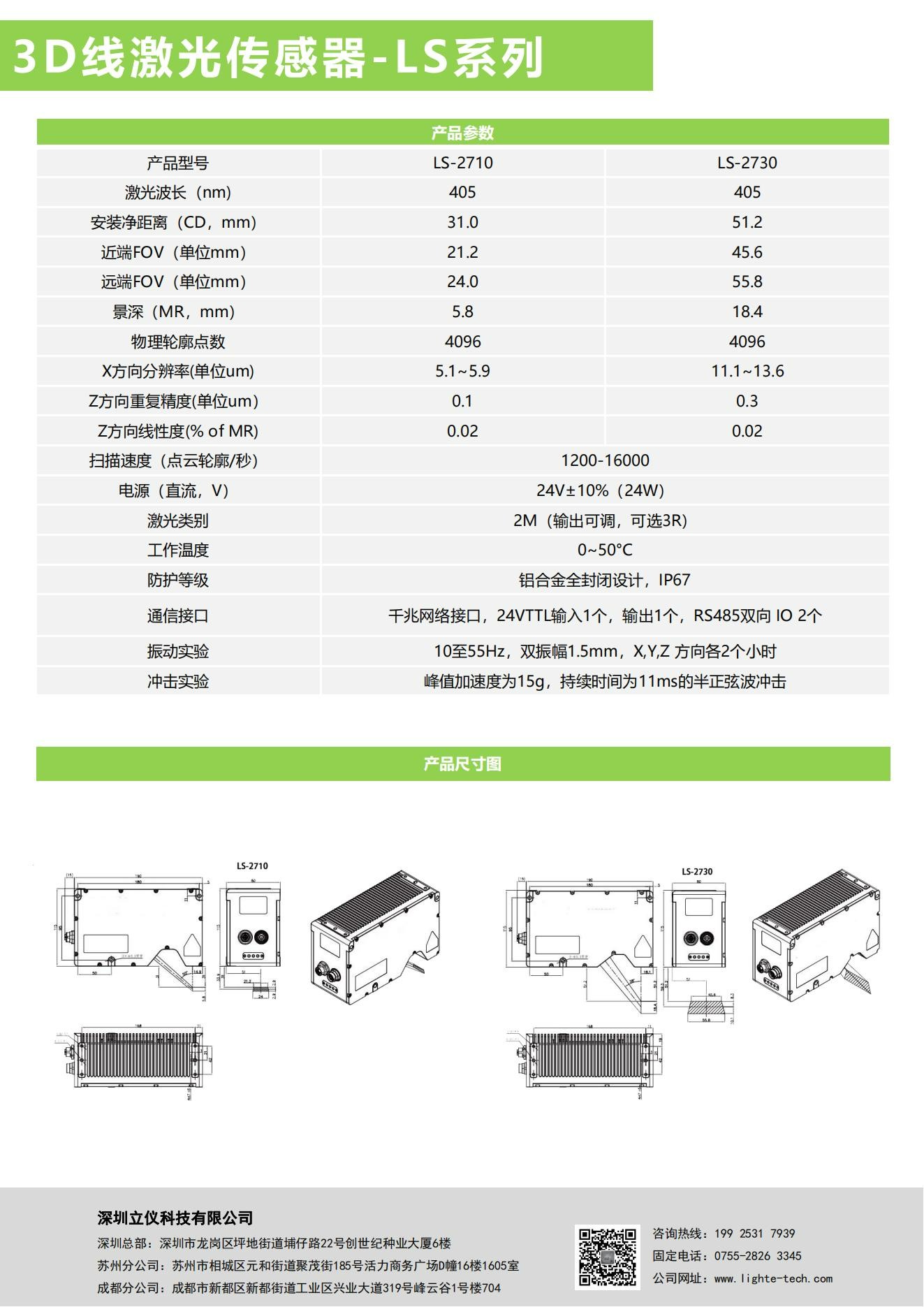
业内领先的系列化高速、高精度4K线激光相机
●主要针对高精密的检测要求,如Pin针、元器件管脚、锂电池电芯焊接等超高精度高速产线需求;
●1200Hz全画幅采集速率,物理轮廓点数4096点,深度图均匀间距采样最高8000点;
●最大视野55.8mm;
●最大测量范围至18.4mm。
技术参数
相关文件下载
相关产品
-

点激光位移传感器
测量原理: 当一束激光以一定的入射角照射被测物体时,激光将在物体表面发生反射和散射,此时在另一角度可以利用透镜将反射的激光汇聚成像到图像传感器上。当被测物体沿激光方向移动时,图像传感器上的光斑也将产生移动,其位移大小对应被测物体的移动距离。由此可以通过算法设计,计算出被测物体相对于基线的移动距离。 -

线激光位移传感器3D工业视觉传感器
激光器产生线激光投射于物体表面,经物体漫反射,被图像传感器采集成像。图像处理器内部解算物体在激光投射处的空间位置,得到激光轮廓X方向的宽度信息和Z方向的深度信息。通过被测物体和传感器的相对运动,获取一系列的轮廓信息进行融合,就可以得到物体完整的三维形貌。